请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
地铁盾构施工中盾构机姿态定位测量的研究
栏目最新
- 东莞至惠州城际铁路隧道安全风险评估与管理
- 高层建筑给排水系统安装施工技术
- 高层建筑施工质量的五个控制要点
- 房屋建筑工程质量问题、原因和防止措施
- 地下停车场防水工程施工质量预控措施
- 试析绿色施工技术在建筑工程中的应用
- 施工企业预算管理措施及案例分析
- 岩溶地区隧道施工综合预报技术案例分析
- 预制块镶面现浇混凝土隧道洞门施工方法
- 建筑施工模板应用技术简析
网站最新
内容提示:结合南京地铁一号线两个区间段地下隧道贯通的测量实践,简明地介绍了地铁建设中各种测量过程,并着重对盾构机姿态定位中的测量工作作了深入细致的研究,阐述了盾构机自动导向系统姿态定位测量的原理和方法,以及如何使用人工测量的方法来检核自动导向系统的准确性,分析了盾构机姿态定位检测的情况。
摘要:结合南京地铁一号线两个区间段地下隧道贯通的测量实践,简明地介绍了地铁建设中各种测量过程,并着重对盾构机姿态定位中的测量工作作了深入细致的研究,阐述了盾构机自动导向系统姿态定位测量的原理和方法,以及如何使用人工测量的方法来检核自动导向系统的准确性,分析了盾构机姿态定位检测的情况。(参考《建筑中文网》)
关键词:地铁;自动导向系统;盾构
1 概述
随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量四个阶段。
本文主要以南京地铁南北线一期工程的2个区间隧道的贯通测量项目为背景,探讨了地铁隧道施工中盾构机自动导向系统定位测量的功能及原理,并阐述了如何用棱镜法来检核自动导向系统的准确性。
2 盾构机自动导向系统的组成与功能
现在的盾构机都装备有先进的自动导向系统,本区间盾构机上的自动导向系统为德国VMT公司的SLS-T系统,主要有以下四部分组成:(1)具有自动照准目标的全站仪。主要用于测量(水平和垂直的)角度和距离、发射激光束。(2)ELS(电子激光系统),亦称为标板或激光靶板。这是一台智能型传感器,ELS接受全站仪发出的激光束,测定水平方向和垂直方向的入射点。坡度和旋转也由该系统内的倾斜仪测量,偏角由ELS上激光器的入射角确认。ELS固定在盾构机的机身内,在安装时其位置就确定了,它相对于盾构机轴线的关系和参数就可以知道。(3)计算机及隧道掘进软件。SLS-T软件是自动导向系统的核心,它从全站仪和ELS等通信设备接受数据,盾构机的位置在该软件中计算,并以数字和图形的形式显示在计算机的屏幕上,操作系统采用Windows2000,确保用户操作简便。(4)黄色箱子。它主要给全站仪供电,保证计算机和全站仪之间的通信和数据传输。
3 盾构机自动导向定位的基本原理
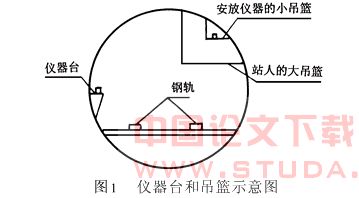
地铁隧道贯通测量中的地下控制导线是一条支导线,它指示着盾构的推进方向,导线点随着盾构机的推进延伸,导线点通常建立在管片的侧面仪器台上和右上侧内外架式的吊篮上,仪器采用强制归心(见图1),为了提高地下导线点的精度,应尽量减少支导线点,拉长两导线点的距离(但又不能无限制的拉长),并尽可能布设近乎直伸的导线。一般两导线点的间距宜控制在150m左右。
盾构机自动导向系统的姿态定位主要是依据地下控制导线点来精确确定盾构机掘进的方向和位置。在掘进中盾构机的自动导向系统是如何定位的呢?它主要是根据地下控制导线上一个点的坐标(即X、Y、Z)来确定的,这个点就是带有激光器的全站仪的位置,然后全站仪将依照作为后视方向的另一个地下导线的控制点来定向,这样就确定了北方向,即方位角。再利用全站仪自动测出的测站与ELS棱镜之间的距离和方位角,就可以知道ELS棱镜的平面坐标(即X、Y),利用三角高程测出ELS棱镜的高程值(即Z)。激光束射向ELS,ELS就可以测定激光相对于ELS平面的偏角。在ELS入射点之间测得的折射角及入射角用于测定盾构机相对于隧道设计轴线(DTA)的偏角。坡度和旋转直接用安装在ELS内的倾斜仪测量。这个数据大约每秒钟两次传输至控制用的计算机。通过全站仪测出的与ELS之间的距离可以提供沿着DTA掘进的盾构机的里程长度。所有测得的数据由通信电缆传输至计算机,通过软件组合起来用于计算盾构机轴线上前后两个参考点的精确的空间位置,并与隧道设计轴线(DTA)比较,得出的偏差值显示在屏幕上,这就是盾构机的姿态,在推进时只要控制好姿态,盾构机就能精确地沿着隧道设计轴线掘进,保证隧道能顺利准确的贯通。
4 盾构机姿态位置的检测和计算
在隧道推进的过程中,必须独立于SLS T系统定期对盾构机的姿态和位置进行检查。间隔时间取决于隧道的具体情况,在有严重的光折射效应的隧道中,每次检查之间的间隔时间应该比较短。这主要是由于空气温度差别很大的效应。论述折射及其效应的题目有大量的文献资料,此处不再详述。在隧道测量时必须始终考虑这一效应。低估这个问题可能会引起严重的困难,尤其在长隧道中。
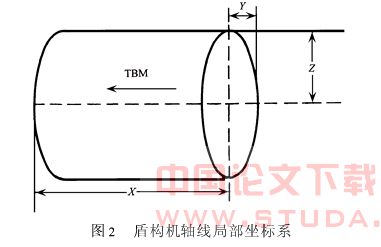
我们采用棱镜法来对盾构机的姿态进行检查。在盾构机内有18个参考点(M8螺母),这些点在盾构机构建之前就已经定好位了,它们相对于盾构机的轴线有一定的参数关系(见表1),即它们与盾构机的轴线构成局部坐标系(见图2)。在进行测量时,只要将特制的适配螺栓旋到M8螺母内,再装上棱镜。现在这些参考点的测量可以达到毫米的精度。已知的坐标和测得的坐标经过三维转换,与设计坐标比较,就可以计算出盾构机的姿态和位置参数等。
下面来说明如何用棱镜法来计算盾构机的姿态和位置。
我们利用洞内地下导线控制点,只要测出18个参考点中的任意三个点(最好取左、中、右三个点)的实际三维坐标,就可以计算盾构机的姿态。对于以盾构机轴线为坐标系的局部坐标来说,无论盾构机如何旋转和倾斜,这些参考点与盾构机的盾首中心和盾尾中心的空间距离是不会变的,他们始终保持一定的值,这些值我们可以从它的局部坐标计算出来。
假设我们已经测出左,中,右(3,8,15号)三个参考点的实际三维坐标,分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),并设未知量为盾首中心的实际三维坐标(X首,Y首,Z首)和盾尾中心的实际三维坐标(X尾,Y尾,Z尾),从图2中可以看出,在以盾构机轴线构成局部坐标系中,盾首中心为坐标原点,坐标为(0,0,0),盾尾中心坐标为(-4 34,0,0)。从表1中也可以看出各参考点在局部坐标系的坐标值。

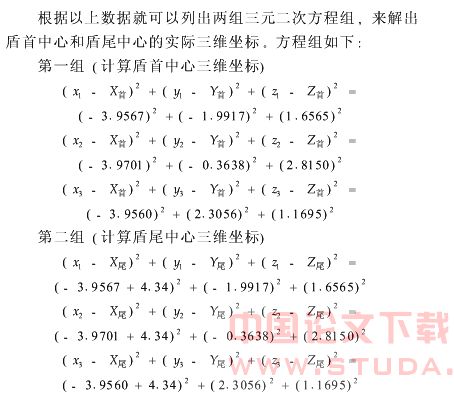
三个方程三个未知量,采用专业软件解算方程组。我们测出某一里程盾构机上三个参数点(3,8,15)的实际三维坐标分别为:

从以上数据可以得知,在与对应里程上盾首中心和盾尾中心设计的三维坐标比较后,就可以得出盾构机轴线与设计轴线的左右偏差值和上下偏差值,以及盾构机的坡度,这就是盾构机的姿态。
把计算得出的盾构机姿态与自动导向系统在计算机屏幕上显示的姿态作比较,据我们的实践经验,只要两者的差值不大于10mm,就可以认为自动导向系统是正确的。
5 结束语
在南京地铁一号线中,张府园~三山街区间隧道分为上行线和下行线两条互相平行的线路,即往返两条隧道。在这两个区间段的实际应用中,曾多次采用棱镜法检核盾构机姿态,两者的偏差值较差均不大于10mm,证明了该方法在检核自动导向系统的正确性是可靠有效的。
在贯通测量中,由于采用了以上一系列的方法和措施,以及先进的自动导向系统指导推进,上行线于2002年9月准确贯通,经甲方检测,平面贯通误差为18mm,高程贯通误差为2mm;下行线于12月准确贯通,平面贯通误差为20mm,高程贯通误差为3mm,均能很好的满足贯通误差不大于50mm的要求。
参考文献
[1] 李青岳.工程测量学.北京:测绘出版社,1984.
[2] 王兆祥等.铁路工程测量.北京:测绘出版社,1988.
[3] 中华人民共和国国家标准.地下铁道、轻轨交通工程测量规范GB50308-1999.北京:中国计划出版社,2000.
原文网址:http://www.pipcn.com/research/200810/13535.htm
也许您还喜欢阅读: